The Mini Cheetah project of Ben Katz was the most interesting open source project in the last decade! If you don’t know, I would highly recommend to check: https://github.com/bgkatz
Ben Katz, a roboticist from MIT, played a pivotal role in developing the motor controller for the MIT Mini Cheetah, a small, agile quadruped robot. The motor controller is essential for the precise movement and coordination of the Mini Cheetah’s legs. It enables the robot to perform complex tasks like running, jumping, and backflips by controlling each motor’s torque, velocity, and position in real-time. Katz’s design focuses on affordability, efficiency, and open-source accessibility, allowing for high-performance locomotion while being compact and lightweight, key to the Mini Cheetah’s versatility and rapid movements.
What is the problem and what I would like to do to cover the gab?
All available integrated BLDC motors, which are combining the motor, gearbox, housing, and control PCB into a single compact unit, are either very expensive (swiss low volume manufacturing) or bad quality and documentation (mostly chinese manufacturer). I am very confused, why nobody is covering the gab, because small actuators are very versatile and can be perfectly used for so many applications e.g. robotic arms, exoskeleton, quadrupeds or humanoid robots.
And unfortunately I just can’t understand why this is the case!
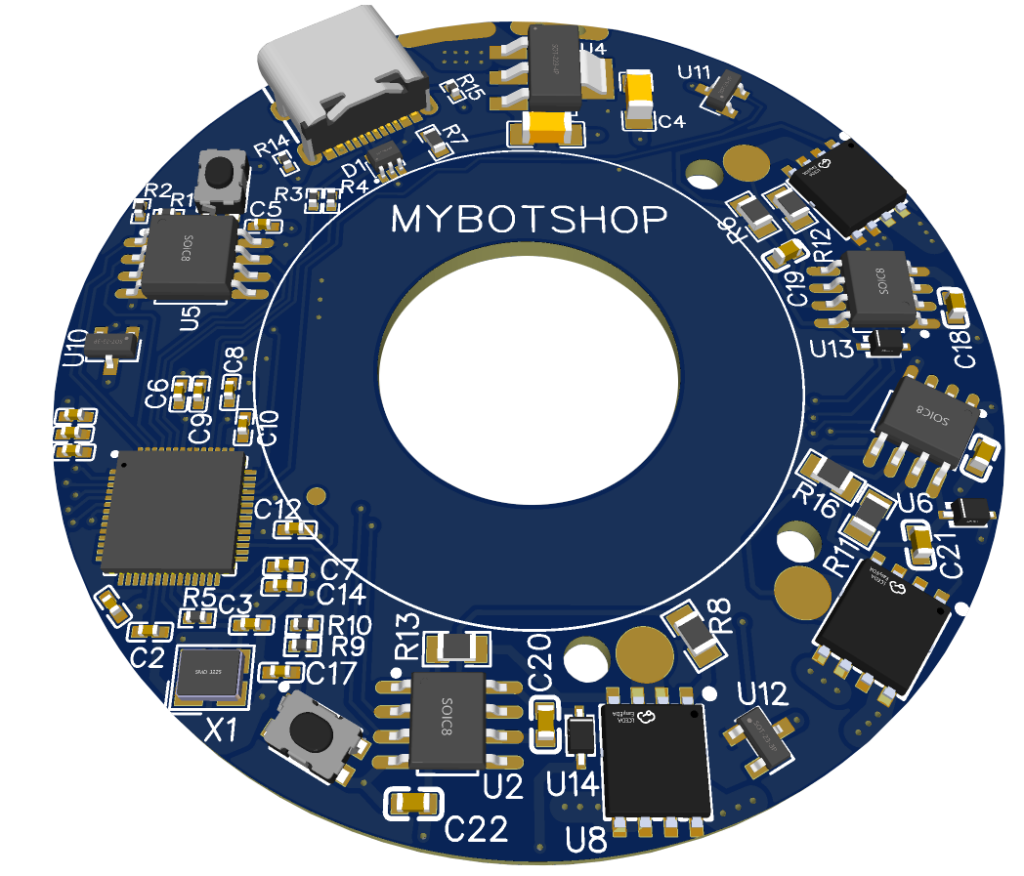
So I just have to start developing and manufacturing integrated BLDC actuators. The first step is the design of the controller. What we have so far:
💡 Fully discrete design – for maximum flexibility and performance.
🔌 USB-C standard – powered easily via USB-C.
🧠 Built-in microcontroller – allows custom code (in C & Python) to be programmed directly.
🤖 Full ROS Support (ROS1 & ROS2)
What we will do with the next iteration?
– Ethercat
– WiFi
Any thoughts or wishes? Would be happy to get some feedback!